
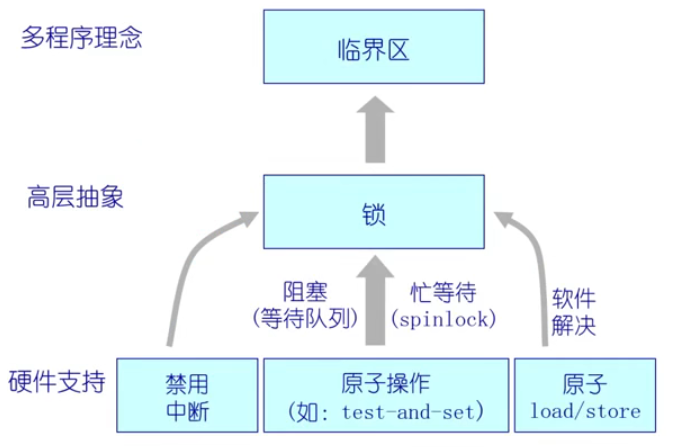
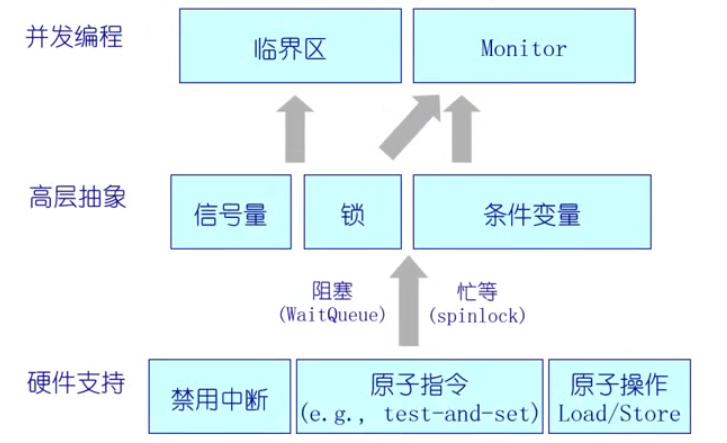
锁(Lock)可以实现对临界区的互斥访问,但多道程序设计仅考虑互斥问题是不够的。除了互斥,还需要考虑同步,以及在临界区内允许多个进程(或线程)进入临界区执行的情况。为了实现这些目标,需要借助更高层的同步互斥的语义,并利用硬件实现的原子操作来实现。
本文介绍信号量(Semaphore),包括二元信号量和一般(计数)信号量。信号量可以实现多个进程(或线程)之间的互斥和同步操作,并允许多个进程(或线程)进入临界区执行。同时,介绍了一种更高级的抽象——管程(Monitor),它可以缓解信号量机制在编写并发程序上的复杂性、简化并发编程。管程是一种程序结构,包含了一组共享变量和操作集合,用于控制对共享资源的访问。
信号量(Semaphore)
信号量操作
信号量(Semaphore)是一种抽象数据结构,用于实现多个进程(或线程)之间的同步和互斥操作的机制。它是一个整型变量(sem),可以用来控制对共享资源的访问。
一个整型变量(sem),具有 2 个原子操作:
P()操作:sem减 1,如果sem < 0,等待,否则继续;V()操作:sem加 1,如果sem <= 0,唤醒一个等待的进程 P。
信号量类似铁路,初始化 2 个资源控制信号灯,进入临界区的进程执行 P() 操作,当临界区已经有 2 个进程时,信号量不足,变为红灯。当再来的进程想要进入临界区时,只能等待,直到某一个进程离开了临界区,变为绿灯,此时进程执行 V() 操作,并将等待的进程唤醒,进入临界区。
信号量由 dijkstra 在 20 世纪 60 年代提出。
P()操作是荷兰语中的 Proberen,意为“尝试”或“试图获取资源”;V()操作是荷兰语中的 Verhogen,意为“增加”或“释放资源”。
信号量特征
- 信号量是整数;
- 信号量是被保护的变量:初始化完成后,唯一改变一个信号量的值的办法是通过
P(), V()操作(操作必须是原子); P()操作能够阻塞、V()操作不会阻塞;- 我们假定信号量是公平的:
- 如果
V()被无限频繁调用(在同一个信号量上),那么没有线程会被阻塞在P()操作上; - 在实践中,FIFO 经常被使用,也就是先被阻塞的线程,先出。
- 如果
自旋锁(Spinlock)能否是 FIFO 类型?不能,锁已被其他线程占用时,该线程会一直自旋(忙等待)直到锁被释放。
信号量两种类型
- 二进制信号量:值可以是 0 或 1;
- 一般 / 计数信号量:值可取任意非负值。
可以通过使用一个类型的信号量来实现另一个类型的信号量(两者相互实现)。
-
使用二进制信号量实现计数信号量:
可以使用一个二进制信号量作为互斥锁(类似于互斥量),用于控制对计数信号量的访问。每当线程要进行计数操作时,需要先获取互斥锁,然后进行计数操作,最后释放互斥锁。这样可以确保每次只有一个线程可以访问计数信号量,保证计数的正确性和一致性。 -
使用计数信号量实现二进制信号量:
可以使用一个计数信号量来实现二进制信号量。计数信号量的初始值为 1,表示资源可用。当线程需要访问二进制信号量时,需要先尝试获取计数信号量。如果计数信号量的值为 1,表示资源可用,线程可以继续执行。如果计数信号量的值为 0,表示资源不可用,线程需要等待。当资源被释放时,线程释放计数信号量,将其值设置为 1,表示资源可用。
信号量两种用途
- 互斥;
- 条件同步(如调度约束:一个线程等待另一个线程的事情发生)。
信号量使用
用二进制信号量实现互斥
1 | mutex = new Semaphore(1); |
必须成对使用 P(), V() 操作:
P()操作保证互斥访问临界资源;V()操作在使用后释放临界资源;P(), V()操作不能次序错误、重复或遗漏。
用二进制信号量实现调度约束(同步)
P() 等待,V() 发出信号后,两个线程实现同步:
1 | condition = new Semaphore(0); |
生产者 - 消费者问题(线程同步)
问题描述与分析
生产者 - 消费者问题 是一个线程同步的问题,其中一个线程等待另一个线程完成某个任务。这个问题通常用于模拟生产者和消费者的情景。
例如,在有界缓冲区的生产者 - 消费者问题中:
- 一个或多个生产者生成数据并将其放入缓冲区;
- 单个消费者每次从缓冲区中取出数据;
- 在任何给定的时刻,只有一个 生产者或消费者能够访问该缓冲区。
1 | ---------- -------- ---------- |
在这种情况下,缓冲区有一个固定的大小,生产者在缓冲区已满时需要等待,而消费者在缓冲区为空时需要等待。
互斥(锁机制)是不够解决这个问题的,因为 生产者和消费者需要在某些条件下等待对方的操作完成 。因此,需要使用其他 同步机制 来协调生产者和消费者的操作。
实现关键与实现方式
实现生产者 - 消费者问题的关键点(正确定要求):
- 在任何一个时刻,只能有一个线程操作缓冲区(互斥约束);
- 当缓冲区为空时,消费者必须等待生产者(调度,同步约束);
- 当缓冲区为满时,生产者必须等待消费者(调度,同步约束)。
实现方式:上述每个约束使用一个单独的信号量:
- 二进制信号量
mutex,初始化为 1,实现互斥访问; - 一般信号量
emptySem,初始化为 n,实现缓冲区空时的同步约束; - 一般信号量
fullSem,初始化为 0,实现缓冲区满时的同步约束。
实现代码
1 | class BoundedBuffer { |
上述代码中,当生产者添加了 n 个数据后,缓冲区满。此时再想添加数据时,emptySem 会小于 0,需要等待。同样地,当消费者取出了一些数据后,缓冲区空。此时再想取出数据时,fullSem 会小于 0,需要等待。缓冲区不满、也不空时,可以互斥的添加或取出数据,无需等待。
信号量实现
使用硬件原语:
- 禁用中断
- 原子指令(Test-And-Set)
类似锁:如禁用中断
1 | class Semaphore { |
管程(monitor)与条件变量
管程定义
管程(monitor)是一种程序结构,结构内的多个子程序形成的多个工作线程互斥访问共享资源——这些共享资源一般是硬件或一群变量。管程实现了 在一个时间点,最多只有一个线程在执行管程的某个子程序。与那些通过修改数据结构实现互斥访问的并发程序设计相比,管程实现很大程度上简化了程序设计。(来自 Wikipedia 的定义)
管程的目的是:将互斥和条件同步的 关注点分离 开来。
- 互斥指的是确保在同一时间只有一个进程可以访问共享资源,而条件同步指的是进程之间通过条件变量进行等待和唤醒的机制。
关注点分离(Separation of Concerns, SoC)是将计算机程序分隔为不同部分的设计原则,每一部分会有各自的关注焦点。
管程主要包含的两个组件:
- 一个锁:用于指定临界区,实现对共享资源的互斥访问;
- 零或多个条件变量:等待 / 通知信号量,用于管程并发访问共享数据。
实现管程的一般方法包括 收集相关共享数据和定义方法来访问这些共享数据:
- 共享数据通常包括需要互斥访问的临界区和条件变量等。
- 方法定义了对共享数据的操作,用于实现互斥访问和条件等待 / 通知的功能。
通过将共享数据和操作封装在一个对象或模块中,可以有效地实现对并发访问的同步控制。
概括之,管程包含一系列共享变量,以及针对这些变量的一系列操作函数(方法),这些变量和函数被封装在一个对象或模块中,便形成了管程的程序结构。
管程设计与实现
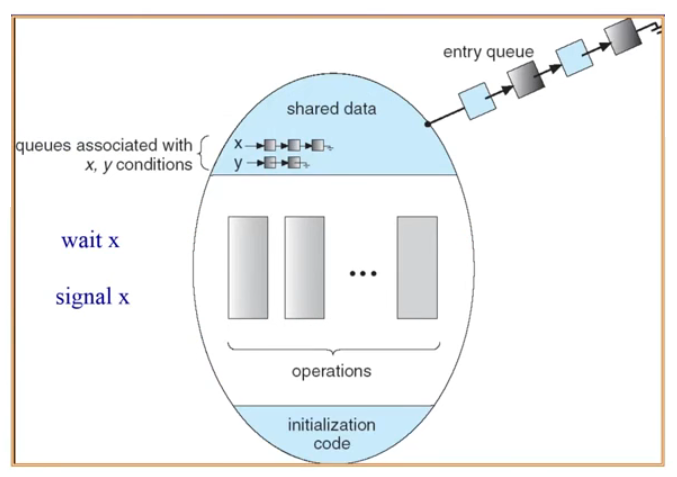
如上图所示,多个线程都想进入管程访问共享资源,这就需要一个 entry queue 等待队列,等待获取管程的锁。当某个线程取得锁后,可以进入管程的临界区,并执行管程管理的一些列操作,如函数 Wait(x) 和 Signal(x)。但当在执行某一个操作时,函数可能对共享变量的需求得不到满足,这时线程会先释放锁 ,并将自身挂到相应的条件变量关联的等待队列上,直到条件变量得到满足后, 重新获得锁,并执行相应的操作。
为了完成上述动作,需要实现如下操作:
锁 Lock:
Lock::Acquire():等待…直到锁可用,然后抢占锁;Lock::Release():释放锁,唤醒等待者(若有)。
条件变量 Condition variable:
- 允许线程在等待状态下进入临界区,而且可以在某个时刻原子释放锁并进入睡眠。
Wait()操作用于释放锁、进入睡眠并重新获得锁。Signal()操作用于唤醒等待者(或者使用broadcast()操作唤醒所有等待者)。
条件变量“允许线程在等待状态下(让其他线程)进入临界区”的意思是,当线程需要等待某个条件满足时,它可以调用条件变量的
Wait()操作来暂时释放锁并进入等待状态。在等待期间,其他线程 可以获得锁并访问临界区。当条件满足时,等待的线程会被唤醒,并重新获得锁,然后可以进入临界区执行相应的操作。这样做的好处是,在等待状态下,线程不会占用系统资源,同时其他线程有机会进入临界区执行任务,提高了系统的并发性能。当条件满足时,被唤醒的线程可以安全地继续执行,而不会出现竞争条件和数据不一致的问题。
条件变量的实现:
- 需要维护每个条件队列;
- 需要实现线程的条件等待
Wait()和通知Signal()。
1 | class Condition { |
上面的 Wait(lock) 函数,为什么是先释放锁、再获取锁呢?
当在执行某一个操作时,函数可能对共享变量的需求得不到满足,这时线程会先释放锁,以便其它线程可以获取锁并执行。如果不释放锁,那所有线程都将无法获取锁,而持有锁的线程也无法满足条件继续执行并释放锁,最终会造成系统崩溃。
管程解决生产者 - 消费者问题
1 | class BoundedBuffer { |
Deposit(c)和Remove(c)中的while可以改成if吗?
管程条件变量的释放处理方式
把上面的 Deposit(c) 和 Remove(c) 分别看做下图中的线程 T1 和 T2,管程条件变量的释放后的处理方式有两种:Hoare-style 和 Hoare-style。
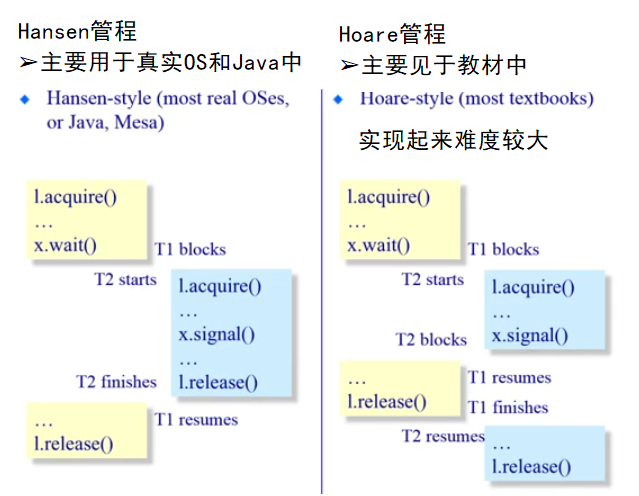
Hansen-style 的Deposit(c):
1 | Hansen_style::Deposit(c) { |
Hansen-style 管程:条件变量的释放仅仅是一个提示、还需要 重新检查 条件,所以用 while 反复检查。
Hoare-style 的Deposit(c):
1 | Hoare_style::Deposit(c) { |
Hoare-style 管程:条件变量释放的同时表示放弃管程访问、释放后条件变量的状态可用,所以用 if。
- Hansen-style 管程:高效。
- Hoare-style 管程:低效。
在 Hansen-style 管程中,使用 while 循环来防止虚假唤醒(spurious wakeups)。虚假唤醒指的是当一个线程被唤醒时,条件可能并没有满足,但唤醒仍然发生。因此,使用 while 循环来检查条件是否满足,如果条件不满足,则线程继续等待。
在 Hoare-style 管程中,使用 if 语句来等待条件满足。Hoare-style 管程假设条件变量的等待队列中只有满足条件的线程,因此使用 if 语句即可。虽然在 Hoare-style 管程中也可能发生虚假唤醒,但它并不对此进行特别处理。(由 GPT 生成)
现在,这张图多了两种种并发编程的实现,即信号量和「锁 + 条件变量」的管程:
参考资料:
1:https://github.com/OXygenMoon/OperatingSystemInDepth
2:https://blog.csdn.net/weixin_53407527/article/details/125207305