
本文介绍进程的调度算法,包括进程调度的相关背景、调度准则,以及各种调度算法。
背景
上下文切换
- 将 CPU 从一个进程 / 线程切换到另一个进程 / 线程;
- 在切换过程中,当前进程 / 线程的执行上下文(CPU 状态)被保存到进程 / 线程控制块(PCB/TCB)中;
- 然后,下一个进程 / 线程的上下文被读取。
CPU 调度
- CPU 调度是从就绪队列中选择下一个要运行的进程 / 线程;
- 调度程序是一个内核函数,通过一些调度策略来选择进程 / 线程;
- 调度什么时候发生?
内核运行调度程序的条件
- 一个进程从运行状态切换到等待状态。
- 一个进程被终止。
满足上述其中一个条件,即可运行调度程序。
不可抢占系统
- 调度程序必须等待事件结束。
可以抢占系统
- 调度程序在中断事件被响应后执行。
- 当前进程从运行状态切换到就绪状态(进程时间片用完),或者一个进程从等待状态切换到就绪状态。
- 当前运行的进程可以被换出。
调度原则
调度策略
- 调度策略:
- 确定如何从就绪队列中选择下一个执行进程。
- 调度策略要解决的问题:
- 挑选就绪队列中的哪一个进程?
- 通过什么样的准则来选择?
- 调度算法:
- 在调度程序中实现的调度策略。
- 比较调度算法的准则:
- 哪一个策略或算法比较好?
程序执行模型
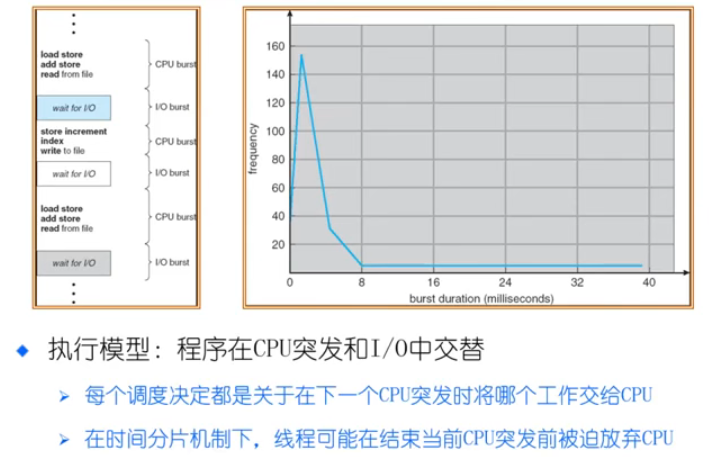
当某进程在进行 I/O 时,没有占用 CPU,此时希望其它进程能有效利用 CPU,使得 CPU 尽可能忙,充分利用资源。
评价指标
-
CPU 使用率:CPU 处于忙状态所占时间的百分比。
-
吞吐量:单位时间内完成的进程数量。
-
周转时间:一个进程从到达就绪队列到完成(结束)所花费的时间,包括所有等待时间。
- 周转时间 = 完成时间 - 达到时间
- 带权周转时间 = 周转时间 / 运行时间
-
等待时间:进程在就绪队列中的总时间。
- 等待时间 = 周转时间 - 运行时间,也等于开始执行时间 - 达到时间
-
响应时间:从一个请求被提交到产生第一次响应所花费的总时间。
评价指标不可兼得
人们通常需要「更快的」服务,但什么是「更快的」服务?
- 在传输文件时,高带宽是更快的;
- 在玩游戏时,低延迟是更快的;
- 这两个因素是独立的。
评价指标的期望:
- 减少响应时间:及时处理用户的输出,并尽快将输出提供给用户;
- 减少平均响应时间的波动:在交互系统中,可预测性比高差异性低平均更重要;
- 增加吞吐量:减少开销(操作系统开销、上下文切换)、高效利用系统资源(CPU、I/O 设备);
- 减少等待时间:减少每个进程的等待时间。
其实这些指标是有矛盾的,比如 很难同时满足 最小响应时间和最大吞吐量,要么只顾及某一点,要么对两点进行折中。
- 吞吐量是操作系统的计算带宽。
- 响应时间是操作系统的计算延迟。
将「公平」作为重要指标
- 保证每个进程占用相同的 CPU 时间。
- 这公平吗?如果一个用户比其他用户运行更多的进程怎么办?
- 保证每个进程等待相同的时间。
- 公平通常会增加平均响应时间。
调度算法
先来先服务算法(FCFS)
先来先服务算法(First Come First Served, FCFS)为非抢占式算法。
调度策略:依据进程进入就绪状态的先后顺序调度。
- 如果当前运行的进程进入阻塞或结束状态时,就绪队列中的下一个进程会得到 CPU。
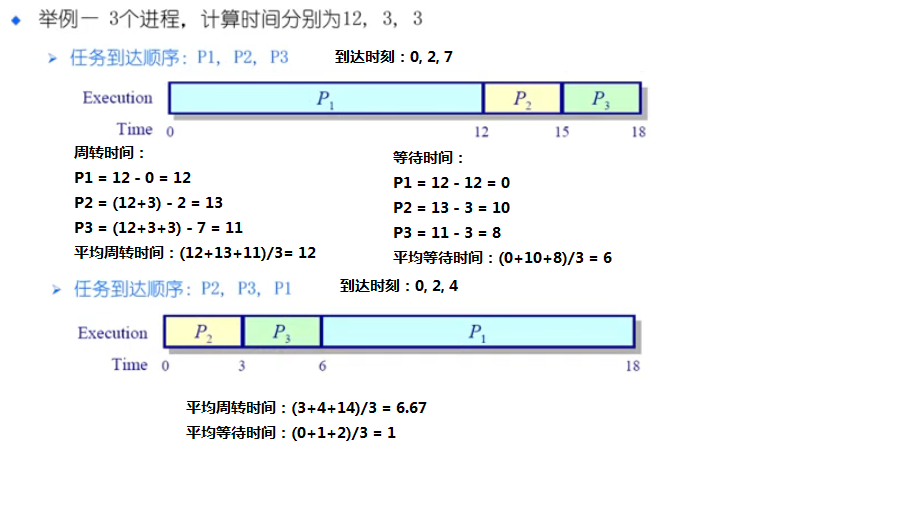
如上图,如果就绪队列前面的进程执行时间较长,周转时间会边长,如果用户请求后面的进程,可能会等待较长时间。
算法特点
优点:简单。
缺点:
- 平均等待时间波动较大;
- 花费时间少的任务可能排在花费时间长的任务后面;
- 可能导致 I/O 和 CPU 之间的重叠处理(一起闲、一起忙):CPU 密集型进程会导致 I/O 设备闲置时,I/O 密集型进程也在等待。
短进程优先算法(SPN/SRT)
在 FCFS 算法中可以观察到,如果把短进程排到前面,周转时间会下降。因此,短进程优先调度算法被提出。
- 短进程优先算法:Shortest Process Next, SPN
- 短作业优先算法:Shortest Job First, SJF
- 最短剩余时间优先算法:Shortest Remaining Time, SRT
SPN 和 SJF 是同一个算法的两种不同叫法,为非抢占式算法;而 SRT 是可抢占式 SPN 算法。
短进程优先算法 调度策略:按照预测的完成时间来将任务入队(队列内时间越短的任务越靠前)。
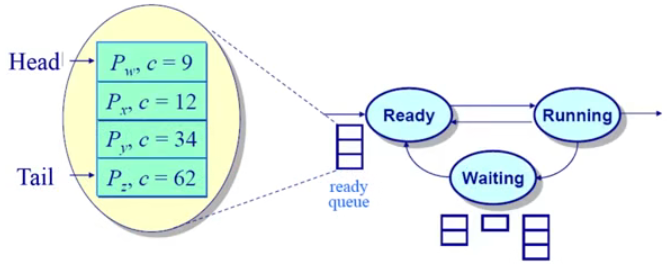
如上图,就绪队列中的四个进程 w, x, y, z 的完成时间分别是 9, 12, 34, 62,因此进程 w 在队列头、进程 z 在队列尾。
在抢占式 SRT 调度算法中,如果发现某个进程比当前进程的剩余时间片还短,则 抢占 CPU 并运行该进程。在 SPN 调度算法中,不可抢占,会将该进程放到就绪队列最前面。
最优平均周转时间
短进程优先算法具有最优平均周转时间。
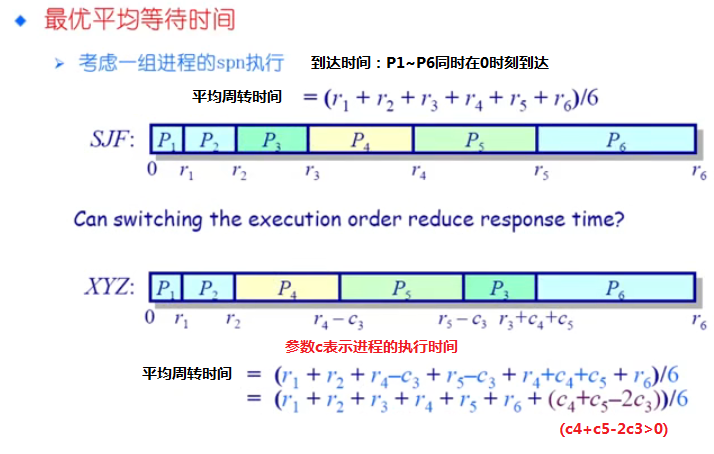
如上图,如果按进程的完成时间从短到长来调度,可以证明其具有最优的平均周转时间。其它情况下,如将 P3 安排在 P5 后运行,则不具有最优的平均周转时间。
算法特点
SPN (SJF) 调度算法的问题:
- 可能会导致饥饿:当有连续的短任务流时,长任务可能会被短任务持续占用 CPU,导致长任务等待时间增加,可能出现饥饿现象。
- 需要预测下一个 CPU 突发持续时间(进程在一次调度中连续占用 CPU 的时间长度)。
- 简单的解决:询问用户。但如果用户欺骗呢?就杀死进程!那如果用户不知道怎么办?
进程执行时间预估
用历史 的执行时间 和预估时间 来估计未来 的执行时间 。其中, 为第 次 实际的 CPU 突发的持续时间, 为第 次 预估的CPU 突发的持续时间。
最高响应比优先算法(HRRN)
最高响应比优先算法(Highest Response Ratio Next, HRRN)为非抢占式调度算法。
调度策略:选择就绪就绪队列中响应比最高的进程。其中,响应比 , 表示等待时间(waiting time), 表示服务执行时间(service time)。
算法特点
- 在短进程优先算法的基础上改进,关注进程的等待时间:
- 不再仅仅考虑执行时间 参数,也增加了等待时间 参数。
- 防止长任务被无限期推迟。
- 依然需要预估服务执行时间。
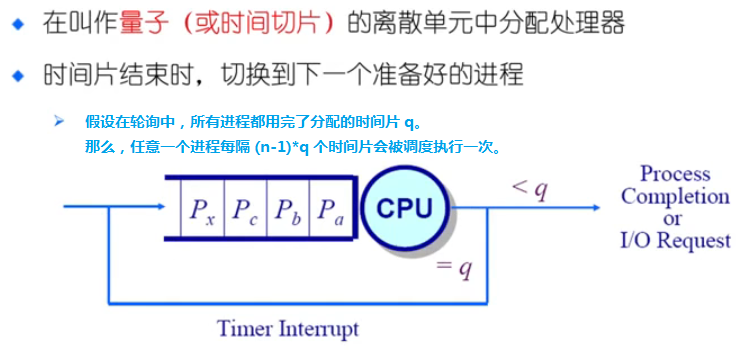
时间片轮询算法(RR)
时间片轮询算法(Round Robin, RR)将为每个进程被分配一个固定的时间片,当一个进程的时间片用完后,它会被剥夺 CPU,并放到就绪队列的末尾,等待下一次调度。
这种方式使得每个进程能够公平地分享 CPU 时间,避免了长时间的饥饿现象。同时,时间片轮转算法也 具有抢占性,因为当一个进程的时间片用完时,它可以被剥夺 CPU,并让其他进程获得执行的机会。
时间片轮询算法 调度策略:使用时间片和抢占来轮流执行就绪队列中的任务。一个进程的时间片用完后,按 FCFS 算法切换到下一个就绪进程。
轮询算法示例
假设有如下进程:
| 进程 | 执行时间 |
|---|---|
| P1 | 53 |
| P2 | 8 |
| P3 | 68 |
| P4 | 24 |
假设为进程分配的时间片为 20,进程没有 I/O 等待,那么进程调度的甘特图为:
1 | | P1 | P2 | P3 | P4 | P1 | P3 | P4 | P1 | P3 | P3 | |
每个进程的等待时间为:
平均等待时间为:
一般 FCFS 算法比 RR 算法的平均等待时间更短——这是因为 FCFS 中没有频繁的上下文切换(一个进程执行完毕后,才会切换一次上下文,执行下一个进程)。但是,FCFS 达不到像 RR 那样及时响应每一个进程。
算法特点
- RR 花销:额外的上下文切换(以保证每个进程都有机会被执行)。
- 若时间片分配太大:
- 进程等待时间过长;
- 极限情况下会退化成 FCFS 算法。
- 若时间片分配太小:
- 反应迅速;
- 吞吐量因大量的上下文切换开销而受到影响。
目标:
- 选择一个合适的时间片大小
- 经验规则:维持上下文切换的开销在 1% 以内(占程序运行),是可以接受的。
多级队列(MQ)
多级队列(Multilevel Queues, MQ)将进程放在多个就绪队列,每个队列具有不同的优先级。
就绪队列被划分成多个独立的队列:
- 比如,前台(交互)、后台(批处理)
每个队列拥有自己的调度策略:
- 比如,前台(RR)、后台(FCFS)
调度必须在不同的队列间进行:
- 以固定优先级方式调度:先处理前台队列,再处理后台队列。
- 可能造成饥饿。
- 以时间片轮询方式调度:每个队列都得到一个确定的能够调度其进程的 CPU 总时间。
- 比如,80% 给使用 RR 的前台,20% 给使用 FCFS 的后台。
算法特点
- 保证公平性的同时,尽量减少进程的等待时间。
- 高优先级队列中的进程可以立即执行。
- 低优先级队列中的进程可以获得更多的时间片来执行,从而增加了它们完成的机会。
- 可以根据进程的行为动态地调整优先级。
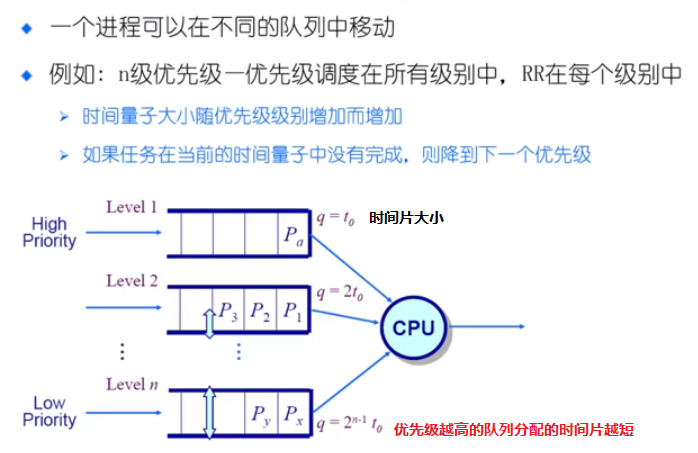
多级反馈队列(MFQ)
在多级队列中,各个队列之间是没有交互的。进一步改进,进程可在不同队列间移动的多级队列算法 ,即多级反馈队列(Multilevel Feedback Queues, MFQ)算法,它 可以根据情况(反馈)调整进程的优先级、队列。
- 初始时,所有进程都被放入最高优先级的队列中。
- 当一个进程获得执行时,它被分配一个时间片来执行,如果在时间片用完之前进程没有完成,它将被移到下一个较低优先级的队列中。
- 如果一个进程在一个较低优先级队列中 等待了一段时间仍然没有执行,它可以被提升到更高优先级的队列中。
算法特点
优点:
- CPU 密集型任务的优先级下降很快;
- I/O 密集型任务停留在高优先级(这是因为这种进程存在 I/O 等待,分配给它的时间片用不完,不会被降级)。
调度算法总结
| 调度算法 | 特点 | 是否可抢占 | 是否饥饿 |
|---|---|---|---|
| 先来先服务(FCFS) | 不公平,平均等待时间较长 | 否 | 是 |
| 短进程优先(SPN / SRT) | 不公平,平均等待时间较短,需要预估进程执行时间 | 否 | 是 |
| 最高响应比优先(HRRN) | 不公平,考虑等待时间和执行时间的比例,防止长任务被无限期推迟 | 否 | 是 |
| 时间片轮循(RR) | 公平,但是平均等待时间较长 | 是 | 否 |
| 多级反馈队列(MFQ) | 结合多种算法,根据进程需求动态调整优先级 | 是 | 否 |
| 公平共享调度(FSS) | 公平是第一要素 | 是 | 否 |
参考资料:
1:https://github.com/OXygenMoon/OperatingSystemInDepth
2:https://blog.csdn.net/weixin_53407527/article/details/125097356